In the context of Intelligent Transportation Systems (ITS), efficient data compression is crucial
for managing large-scale point cloud data acquired by roadside LiDAR sensors. The demand for
efficient storage, streaming, and real-time object detection capabilities for point cloud data
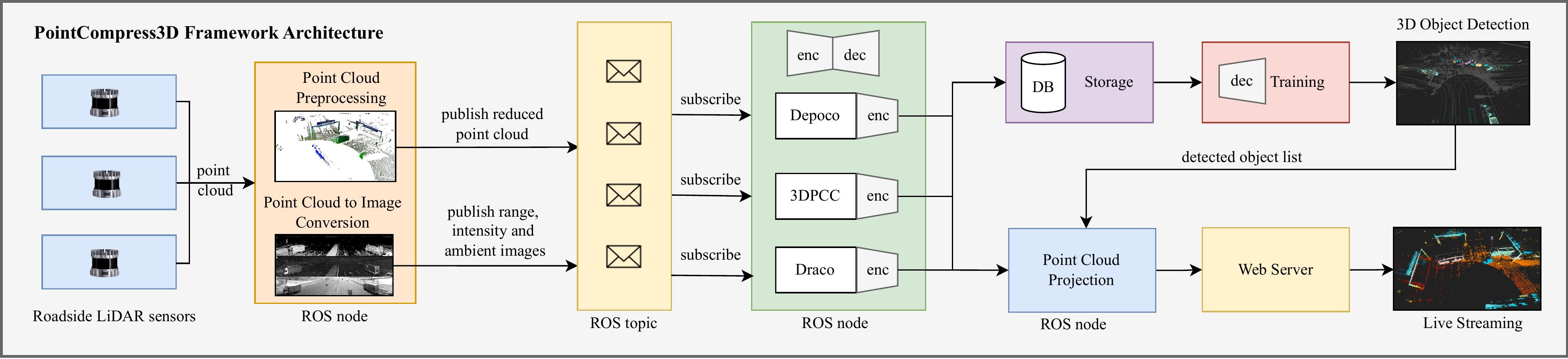
is substantial. This work introduces PointCompress3D, a novel point cloud compression framework
explicitly tailored for roadside LiDARs. Our framework addresses the challenges of compressing
high-resolution point clouds in real time while maintaining accuracy and compatibility with
roadside LiDAR sensors. We adapt, extend, and integrate three cutting-edge compression methods
and evaluate them on the real-world TUM Traffic datasets. Moreover, we deploy our compression
framework on a real ITS test bed for autonomous driving and test it under real traffic
conditions. After fine-tuning, we achieve a frame rate of 10 FPS while keeping compression sizes
below 105 Kb, a reduction of 50 times, and maintaining object detection performance on par with
the original data. In extensive experiments and ablation studies, we finally achieved a PSNR d2
of 94.46 and a BPP of 6.54 on the TUM Traffic datasets. The code is available on our project
website: https://pointcompress3d.github.io.